
扫一扫
加微信
・作为“走行轴”“旋转轴”等6轴多关节机器人的第7轴以后,在机器人控制中通过附加动作装置,可以扩大机器人的动作范围和能力。
①:作为机器人的外部轴,通过机器人自身的控制使其动作的方法。
②:用PLC等外部控制装置控制动作的方法。
·“机器人外部轴”通过由机器人自身控制,可以在机器人侧自由设定动作定时、动作位置等,因此程序或控制容易。可与行走装置、旋转轴、多轴或其它机器人组合使用。但是需要专用的电缆和接口,因此价格较高。
“外部控制轴”与机器人分开由PLC等进行控制。如果系统复杂,希望由PLC主体进行控制,则此方式有效。
·也可对应“全罩式”和“吊挂式”等。根据使用动作环境、设置场所的限制等,也可进行定制。
我们可根据客户要求进行设计制作,欢迎来电咨询。
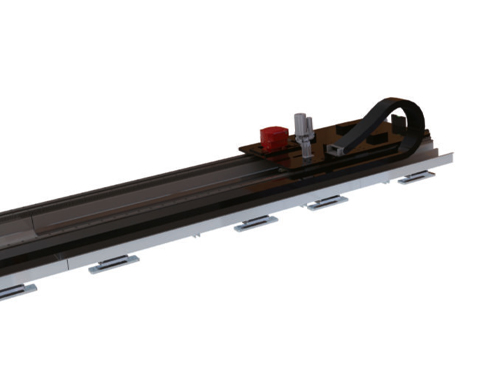
产品简介:
在机器人运行环境要求地轨拖链不能超出地轨两端、地轨内部空间不能满足拖链内置时,我们将采用拖链外置式地轨。
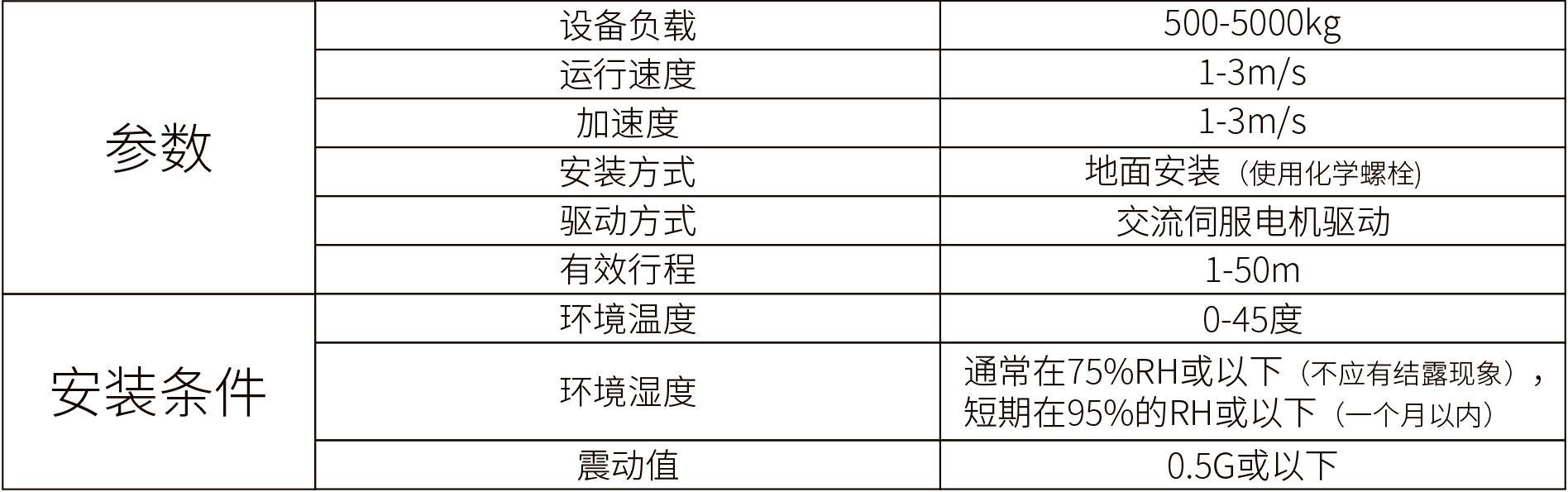
性能参数: